MHY2-16D-M9N: Delicate Gripping, Precise Centering! Parallel Gripper Empowers Precision Automation
2025-10-17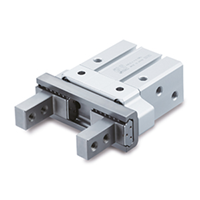
In automated grasping, handling, and assembly applications, stable and precise clamping of workpieces is a core requirement. The MHY2-16D-M9N is a parallel gripper that, with its compact structure, accurate finger centering, and reliable clamping force, serves as an ideal choice for achieving precise gripping in robotic end-effectors or automated equipment.Core Product AdvantagesParallel Opening/Closing with Precise CenteringThe fingers maintain parallel movement throughout the opening and closing cycle, ensuring precise centering of the grip points. High repeatability accuracy (up to ±0.01mm) makes it perfectly suited for the pick-and-place of precision workpieces.Compact and Lightweight DesignThe compact structure and light weight effectively reduce the load on the robot’s arm, making it particularly suitable for high-speed, high-cycle-rate automation applications.High Clamping Force and RigidityAn optimized lever mechanism provides high clamping force relative to a smaller bore size. The robust body offers high rigidity, ensuring stable clamping without shaking.Versatile Mounting InterfacesStandardized mounting holes (M9N likely indicates a mounting specification) facilitate easy integration onto robot flanges or custom fixtures. Standardized finger mounting faces support the quick changeover of different fingers.Magnetic Switch ReadyThe cylinder body is pre-grooved for magnetic switches to detect open/closed states, enabling grip confirmation and process control.Typical Application ScenariosRobotic Loading/Unloading: Workpiece picking and placing for machine tools, injection molding machines.Precision Assembly: Assembly and positioning of electronic components, small precision parts.Inspection & Sorting: Part positioning and sorting in conjunction with vision systems.Packaging & Logistics: Palletizing and sorting of small boxes, bags.Technical Parameters (Typical Values)Bore Size: 16mm (determines clamping force)Stroke: Varies by model (e.g., single finger stroke XXmm)Max. Clamping Force: XXX N (@0.7MPa)Operating Pressure: 0.1 ~ 0.7 MPaAmbient Temperature Range: -10°C ~ +60°CSummaryThe MHY2-16D-M9N Parallel Gripper acts as a “Precision Mechanical Hand” for automated grasping tasks. Its parallel opening/closing characteristic ensures gripping repeatability and stability, while its compact design makes it a key component for enhancing equipment integration density and cycle efficiency.Choosing the MHY2-16D-M9N means equipping your automation system with precise, reliable, and efficient gripping capabilities!
| MHY2-20D-M9PZ |
| MHY2-20D-M9P |
| MHY2-16D2-M9NL |
| MHY2-20D-M9PSDPC |
| MHY2-16D-M9NL |
| MHY2-25D-M9BVL |
| MHY2-10D |
| MHY2-25D-M9N |
| MHY2-25D-M9P |
| MHY2-16D |
| MHY2-16D-20-Z1A00126 |
| MHY2-25D-M9BZ |
| MHY2-16D-M9NVZ |
| MHY2-16D-X6663 |
| MHY2-16D2-M9BVL |
| MHY2-20D-M9BVL |
| MHY2-10D2-M9B |
| MHY2-25D-M9NVL |
| MHY2-16D-M9PVL |
| MHY2-16D-M9BL |
| MHY2-20D2-M9BZ |
| MHY2-16D-X6663 |
| MHY2-10D |